


жИЖЈКЭЙКТђЛњЦїШЫКИНгЯЕЭГПЩФмОпгаЬєеНадЃЌашвЊЖдЮДРДЕФСуМўЪ§СПКЭЙЄзїРраЭНјаадЄВтЁЃЛњЦїШЫЯЕЭГжЦдьЩЬКЭМЏГЩЩЬЃЈШчЙћФње§дкгыжЎКЯзїЃЉНЋАяжњФњЮЊФњЕФгІгУжИЖЈ***МбЯЕЭГЁЃШЛЖјЃЌдкетИіЙ§ГЬжаОГЃЭќМЧШчКЮЙЬЖЈСуМўЁЃШЛЖјЃЌетаЉЙЬЖЈзАжУгаЪБПЩвдОіЖЈАВзАЕФГЩАмЁЃ
(БОЮФЭМЦЌОљРДздЭјТчЃЌЧжЩО)
дкжИЖЈЯЕЭГвЊЧѓЕФ***НзЖЮОЭПЊЪМПМТЧМаОпЪЧжСЙиживЊЕФЁЃЖЈЮЛЦїЕФГажиФмСІКЭАкЖЏжБОЖЕШЬиадВЛНівЊПМТЧФњЕФСуМўЃЌЛЙвЊПМТЧЕНМаОпЁЃ
МаОпЮѓНт
дкЙКТђЛњЦїШЫКИНгЯЕЭГЕФаЫЗмжаЃЌжЦдьЩЬПЩФмЛсВњЩњЮѓНтЃЌдкЪЕЪЉКЭЪЙгУЙ§ГЬжаПЩФмЛсЕМжТГЩБОИпАКЁЃ
ШЫУЧЭЈГЃШЯЮЊзщМўЕФЫљгаЫЩЩЂВПМўЖМПЩвдЭъШЋЙЬЖЈдкЛњЦїШЫЩЯЃЌЖјЮоашЯШНЋЫќЙЬЖЈдквЛЦ№ЁЃОЁЙмМђЕЅСуМўПЩФмЪЧетжжЧщПіЃЌЕЋИДдгЕФзщМўПЩФмашвЊдкЗХжУдкЛњЦїШЫЩЯжЎЧАНЋЦфЙЬЖЈдквЛЦ№ЁЃШчЙћВЛЙЬЖЈИДдгЕФзщМўЃЌМаОпЭЈГЃЛсБфЕУЗЧГЃИДдгЃЌвджТгкзшАМгдиЙ§ГЬВЂзшжЙНјШыКИНгНгЭЗЁЃ
ЖдИДдгЕФзАХфНјааЖЈЮЛПЩвдМгПьЛњЦїШЫЕФМгдиЪБМфЃЌВЂЯдзХНЕЕЭЛњЦїШЫЩЯМаОпЕФИДдгадЃЌДгЖјдіМгЛњЦїШЫЖдЫљгаКИНгНгЭЗЕФЗУЮЪЁЃдкЙКТђЛњЦїШЫКИНгЯЕЭГжЎЧАЯъЯИВщПДФњЕФСуМўЃЌвдШЗБЃЭЈЙ§ЬсЧАШЗЖЈЖЈЮЛашЧѓРДМђЛЏСїГЬЁЃ
ЛњЦїШЫЭЈГЃБЛШЯЮЊ***ЪЪгУгкДѓХњСПЙЄзїЁЃЕЋЪЧЃЌЪЙгУЪЪЕБЕФЙЄвеКЭСщЛюЕФМаОпЃЌаэЖрЙЋЫОвВЗЧГЃГЩЙІЕиНЋЛњЦїШЫгУгкаЁХњСПЙЄзїЁЃЙ§ГЬКЭМаОпНЋОіЖЈетжжЗНЗЈЕФгЏРћФмСІЁЃ
ЖдПьЫйзЊЛЛЕФИажЊвЊЧѓЯђДѓЖрЪ§ШЫБэУїашвЊзЈгУЙЬЖЈзАжУЁЃЕЋЪЧЃЌФЃПщЛЏМаОпПЩвдЮЊФњЕФЯЕЭГЬсЙЉзМШЗЁЂПЩжиИДКЭСщЛюЕФбЁЯюЁЃСЫНтФње§дкЭЖзЪЕФМаОпЕФСщЛюадПЩвдАяжњФњМЦЛЎдкЖЬЪБМфФкНЋИќЖрСуМўв§ШыФњЕФЛњЦїШЫКИНгЯЕЭГЁЃ
ЖЈЮЛЦїбЁЯю
ЛњЦїШЫКИНгЯЕЭГЕФЙиМќзщМўжЎвЛЪЧЖЈЮЛЦїЃЌЮоТлЪЧМђЕЅЕФЙЬЖЈЙЄзїЬЈЛЙЪЧИќИДдгЕФЖржса§зЊЖЈЮЛЦїЁЃБфЮЛЛњЕФЬиадНЋЪЧЛњЦїШЫКИНгЯЕЭГСщЛюадКЭЪЪгІадЕФОіЖЈадвђЫиЁЃ
гааэЖрВЛЭЌРраЭЕФЖЈЮЛЦїЃЌУПжжЖМгаздМКЕФвЛзщЬиадЁЃдкетРяЃЌЮвУЧЬжТлФњдкзМБИКИНгЯЕЭГЪБ***гаПЩФмПМТЧЕФРраЭЃЌОЁЙмЛЙгаЦфЫћбЁдёЁЃ
жїжсЯф/ЮВМмЖЈЮЛЦї
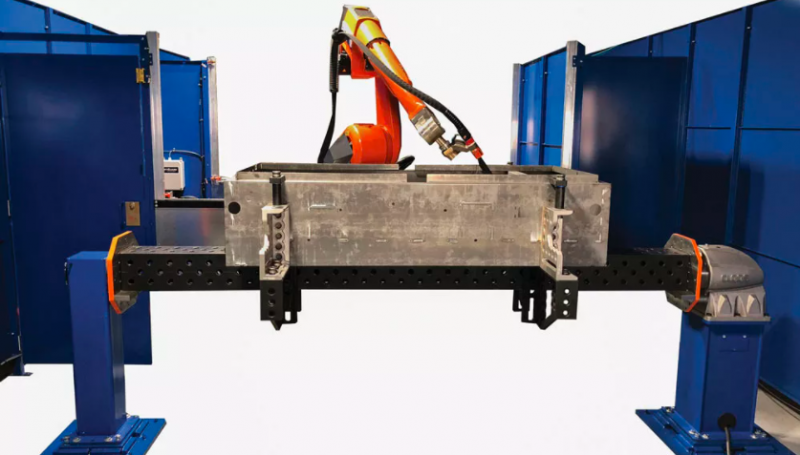
етаЉЖЈЮЛЦїЃЈМћЭМ 1ЃЉгавЛИіМЙжљЃЌдкЖЏСІЖЫЃЈжїжсЯфЃЉКЭЗЧЖЏСІЖЫЃЈЮВМмЃЉжЎМфбгЩьЁЃМаОпКЭСуМўАВзАдкМЙжљЩЯЁЃЃЈФІЬьТжЪНЖЈЮЛЦїОпгаЯрЫЦЕФХфжУЃЌВЂЧвОпгааэЖрЯрЭЌЕФвЊЧѓЁЃЃЉ

ЭМ1ДЫДІЯдЪОЕФЪЧДјгаМаОпПђМмЕззљЕФЭЗМмЮВМмЖЈЮЛЦї
етжжЖЈЮЛЦїЕФЙиМќЬиадАќРЈжїжсЯфКЭЮВМмжЎМфЕФОрРыЁЂГажиФмСІЁЂжиаФ (CG) КЭЛизЊжБОЖЁЃ
ЭЗзљКЭЮВзљжЎМфЕФОрРыгАЯьПЩвдЙЬЖЈЕФСуМўЕФГпДчКЭЪ§СПЁЃШчЙћФњМЦЛЎЭЌЪБКИНгЖрИізщМўЃЌдђБиаыдкДЫЩшжУЕФжїжсЯфКЭЮВМмжЎМфСєГізуЙЛЕФОрРыЁЃ
ЖЈЮЛЦїЕФАкЖЏжБОЖБиаызувдШУСуМў360ЖШа§зЊЖјВЛЛсзВЕНеЯАЮяЁЃМДЪЙФњВЛДђЫу 360 ЖШа§зЊЃЌЧПСвНЈвщФњжИЖЈвЛИіЯЕЭГвддЪаэЭъШЋа§зЊЃЌвђЮЊетНЋЗРжЙБРРЃЁЃ
АкЖЏжБОЖВЛНівЊПМТЧСуМўЕФГпДчЃЌЛЙБиаыЮЊМаОпСєГіПеМфЃЌАќРЈгУгкЖЈЮЛСуМўЕФМаОпКЭЦфЫћзщМўЁЃдкЭМ 2 жаЃЌЮвУЧПДЕНвЛИіБэЪОжїжсЯф/ЮВМмЖЈЮЛЦїЖЫЪгЭМЕФЭМБэЁЃащЯпдВШІЪЧЖЈЮЛЦїЕФАкЖЏжБОЖЁЃШчФњЫљМћЃЌСуМўКЭМаОпЖМЪЪКЯАкЖЏжБОЖЁЃ

ЭМ 2 - ЖЈЮЛЦїЕФДЫЖЫЪгЭМЯдЪОСЫАкЖЏжБОЖ
ЖЈЮЛЦїЕФГажиФмСІжСЙиживЊЁЃЖЈЮЛЦїВЛНіБиаыФмЙЛжЇГХСуМўЕФжиСПЃЌЖјЧвЛЙБиаыГаЪмМаОпЕФжиСПЁЃетЪЧвЛИіОГЃБЛКіЪгЕФЗНУцЃЌПЩФмГЩЮЊЛњЦїШЫЯЕЭГЕФбЯжиЯожЦЁЃ
CG вВОГЃБЛКіЪгЁЃCG РыЖЈЮЛЦїЕФжааФЯпдНдЖЃЌЙіЖЏМаОпКЭСуМўЫљашЕФХЄОиЃЈЛђТэСІЃЉОЭдНДѓЁЃДѓЖрЪ§ЧщПіЯТЃЌетвтЮЖзХМаОпКЭСуМўашвЊЯђЯТвЦЖЏвдНЋжиаФБЃГждкЖЈЮЛЦїЕФжааФЯпИННќЁЃдйПДЭМ2ПЩвдПДЕНЃЌЫфШЛЛгИЫжБОЖУЛгаЮЪЬтЃЌЕЋЪЧжиаФЬЋИпСЫЁЃЭМ 3 ЯдЪОСЫШчКЮНЋМаОпЯђЯТвЦЖЏвдИФЩЦжиаФЁЃШЛЖјЃЌЯждкМаОпдкАкЖЏжБОЖжЎЭтЁЃ

ЭМ 3 - дкДЫЭМжаЃЌЮвУЧПДЕНВЙГЅжиаФЛсЕМжТАкЖЏжБОЖГіЯжЮЪЬт
ашвЊЕїећЙЬЖЈзАжУвдЛёЕУЪЪЕБЕФжиаФЃЌЭЌЪБШдШЛдкАкЖЏжБОЖЕФЗЖЮЇФкЙЄзїЁЃЭМ 4 ЯдЪОСЫТњзужиаФКЭАкЖЏжБОЖвЊЧѓЕФаЃе§ЩшжУЁЃ

ЭМ 4 - ДЫЩшжУТњзужиаФКЭЛгИЫжБОЖвЊЧѓ
зЊХЬЛђЁАЗжЖШЁБЖЈЮЛЦї
зЊЬЈЖЈЮЛЦїЭЈГЃгаСНИіЛђИќЖрЙЄЮЛЃЈЭМ 5ЃЉЁЃвЛИіЙЄЮЛгУгкСуМўзАди/аЖдиЃЌЖјКИНгдкСэвЛЙЄЮЛНјааЁЃЕБИУЙ§ГЬЭъГЩЪБЃЌБэЫїв§ВЂжиИДИУЙ§ГЬЁЃетжжЗчИёЕФЙЬЖЈзАжУЕФСэвЛИіГЃМћЪѕгяЪЧРСЖшЕФЫеЩКЁЃ

ЭМ 5 - ИУзЊХЬЖЈЮЛЦїЮЛгкМЏГЩЕЅдЊжа
зЊЬЈЖЈЮЛЦїЕФЙиМќЬиадАќРЈЙЄзїЬЈЕФжБОЖКЭГажиФмСІЁЃ
ЙЄзїЬЈЕФжБОЖгАЯьПЩвдЭЌЪБЙЬЖЈЕФСуМўЕФГпДчКЭЪ§СПЁЃ
ЖЈЮЛЦїЕФГажиФмСІвВКмЙиМќЁЃЖЈЮЛЦїБиаыФмЙЛжЇГХСуМўЕФжиСПвдМАМаОпЕФжиСПЁЃ
ЙЬЖЈЖЈЮЛЦї
ЙЬЖЈЖЈЮЛЦїЃЈМћЭМ 6ЃЉВЛЛсвЦЖЏБЛМаГжЕФСуМўЃЌЖјЪЧдЪаэЛњЦїШЫвЦЖЏЃЈгаЪБбизХЙьЕРЃЉВЂдкСуМўЙЬЖЈЕНЮЛЕФЭЌЪБНјааКИНгЁЃ
ПМТЧетжжРраЭЕФЖЈЮЛЦїЪБЃЌжївЊПМТЧЕФЪЧШЗБЃЛњЦїШЫПЩвдЕНДяЫљгаКИНгНгЭЗЃЌЖјЮоашЙ§ЖШДІРэКЭжиаТЖЈЮЛСуМўЁЃ

ЭМ 6 - ДЫДІЮвУЧПДЕНСЫвЛИіЙЬЖЈЖЈЮЛЦїЕФЪОР§
МаОпбЁЯю
аэЖрЙЋЫОЗЂЯжФЃПщЛЏМаОпгыЛњЦїШЫКИНгЯЕЭГЕФСщЛюадЁЂПЩжиИДадКЭзМШЗад***ЦЅХфЁЃЫќдЪаэФњЕФЛњЦїШЫКИНгЯЕЭГжЦдьИќЙуЗКЕФСуМўбЁдёЁЃетаЉМаОпЯЕЭГЕФЩшМЦЪЙФњПЩвдЛёЕУгыЛњЦїШЫКИНгЯЕЭГЯрЭЌЕФжиИДадКЭзМШЗадЃЌМДЪЙФњИќЛЛСуМўЁЃПЩЧсЫЩЪЕЯж 0.005 гЂДчвдФкЕФжиИДадЁЃ
дкжИЖЈЛњЦїШЫКИНгЯЕЭГЪБЃЌФњашвЊПМТЧаэЖрБфСПЁЃЮЊШЗБЃНЋЛњЦїШЫГЩЙІМЏГЩЕНФњЕФСїГЬжаЃЌдкЩшМЦКЭЪЕЪЉжЎЧАЛиД№гаЙиМаОпЕФЙиМќЮЪЬтжСЙиживЊЁЃ
